My projects across academia and industry have helped me develop skills in hardware, software, and human-robot interactions. Check them out and feel free to contact me with further questions!
Hardware: Actuators, Sensors, and Real-Time Systems
-

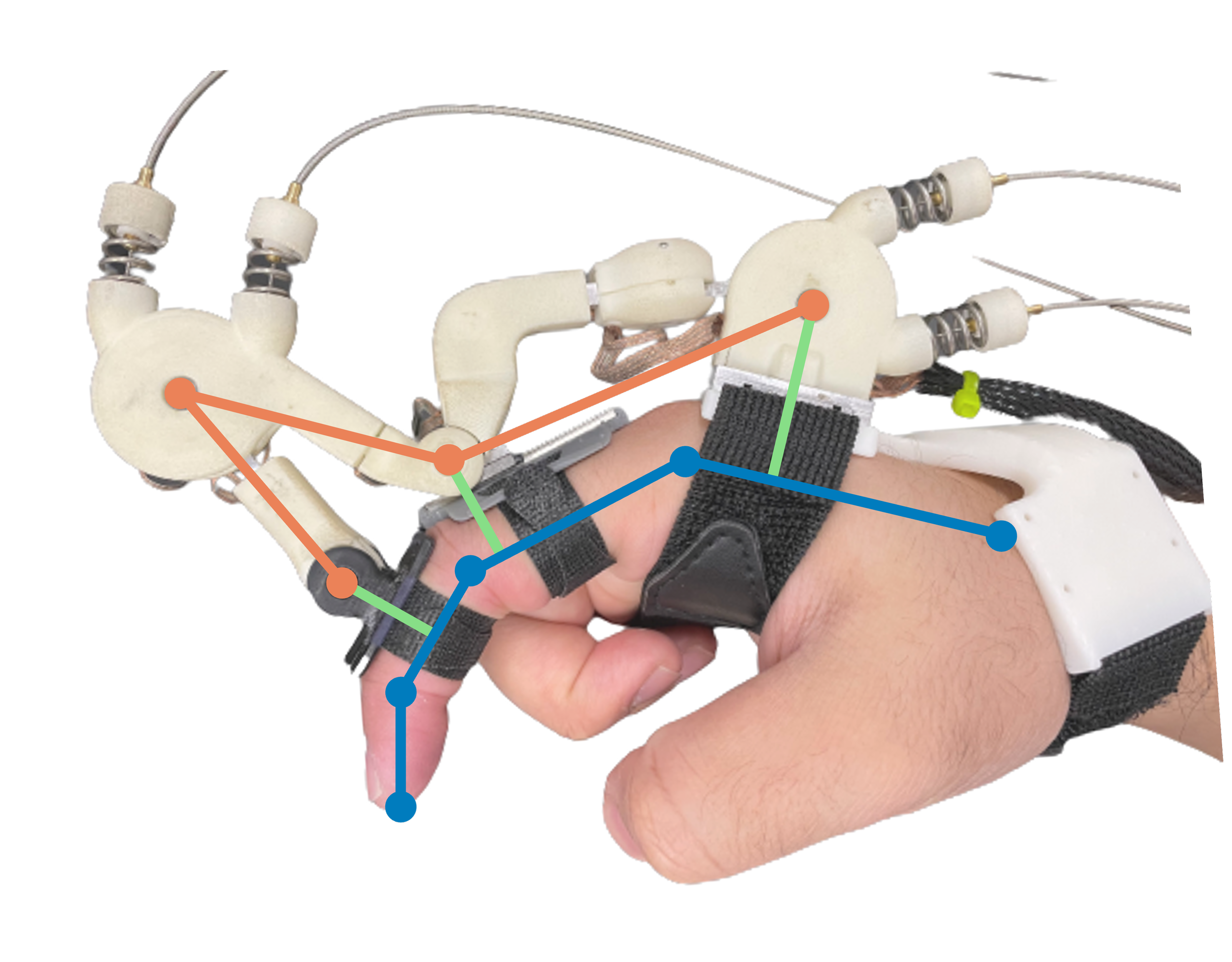
Multi-DOF Hand Exoskeleton System
Bowden Cable SEAs, Real-Time Control, C++, EtherCAT, Embedded Systems, Force Feedback
-

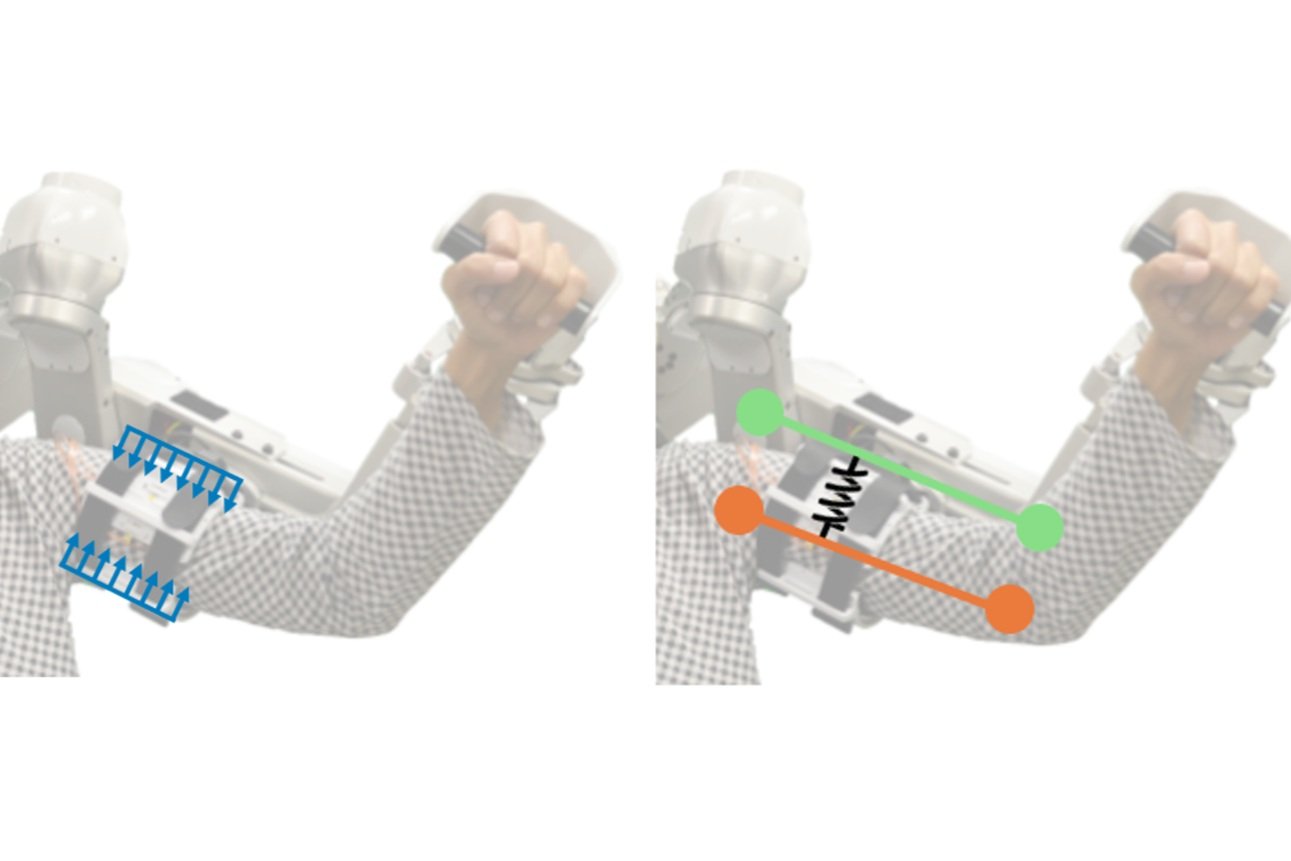
Series Elastic Actuator Validation and Control
Torque Estimation, Backlash Compensation, System Identification, Actuator Validation, SEA Design
-
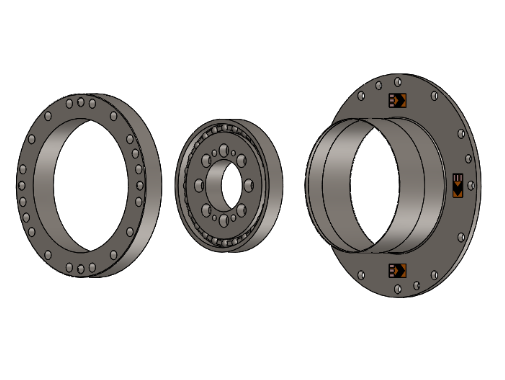
Torque Sensing for Robotic Actuators
Strain Gauge Integration, Harmonic Drives, Signal Conditioning, Subsea Robotics, Precision Measurement
Hardware: Instrumentation and Mechanical Design
-

Distributed Force Sensing Interface
Force-Sensing Resistors, PCB Design, Signal Processing, Data Acquisition, Distributed Sensing Arrays
-

Automated Biomechanics Testbed
Linear Actuators, Single-Axis Load Cells, Precision Positioning, Force-Displacement Indentation
-

Multi-Sensor Instrumented Hand
Magnetoresistive Sensors, Electronics Integration, Signal Processing, Joint Angle Measurement
Software: Modeling, Controls, and Simulation
-
Teleoperation for Dexterous Manipulation
Haptic Feedback, Human-in-the-Loop, Forward Kinematics, Real-time Optimization, Bilateral Control
-
Multi-Body Kinematics & Dynamics Modeling
Four-Bar Linkages, Forward Kinematics, Jacobian, Mechanism Design, Simulation Analysis
-

Closed-Loop Force Control Tensioning
PID Control, Servomotor Integration, Controller Tuning, Force Feedback, Force-Sensing Resistors (FSRs)
Human Factors and Interface Design
-

Interface Optimization for Wearable Robotics
A/B Testing, User Experience Design, Statistical Analysis, Interface Stiffness, Design Validation, Mixed Methods
-
Adaptive Interface Design and User Comfort
Actuated Tensioning, Muscle Activation Effects, Mixed-Effects Modeling, Comfort Optimization, Human-Centered Design
-

Human Biomechanics & Tissue Properties
Viscoelastic Characterization, Indentation Testing, Biomechanical Modeling, Human Factors Research, Tissue Mechanics