Adaptive Interface Design and User Comfort for Wearable Arm Robots
This research examined how strap pretension and user muscle activation jointly influence physical comfort and interaction quality at forearm attachment interfaces. The study developed methods for actively modulating interface properties to optimize human-robot coupling during device operation.

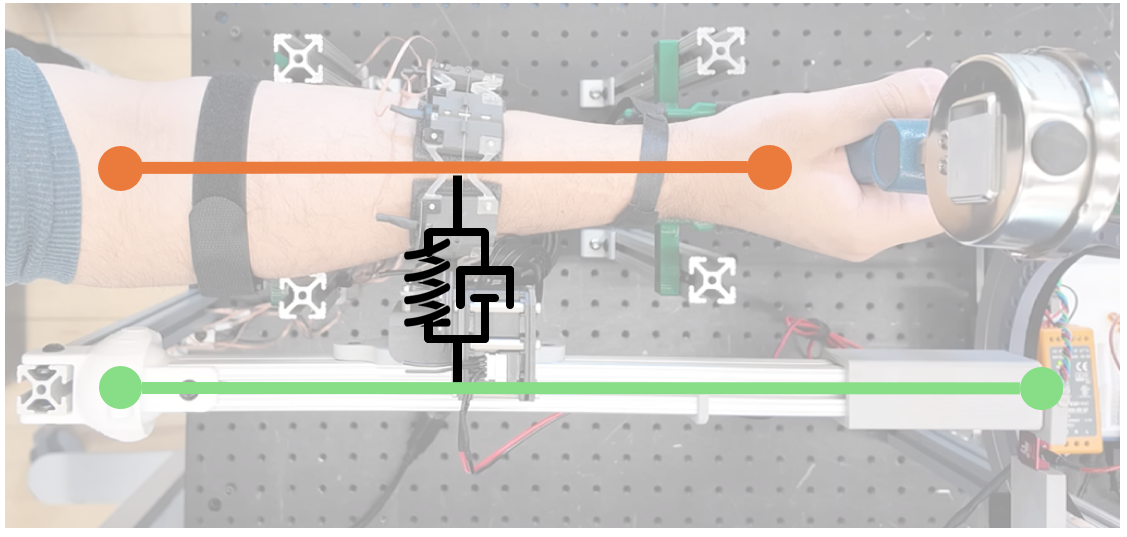
This study explored the trade-off between user physical comfort (left) and device interaction quality (right) in arm attachment interfaces.
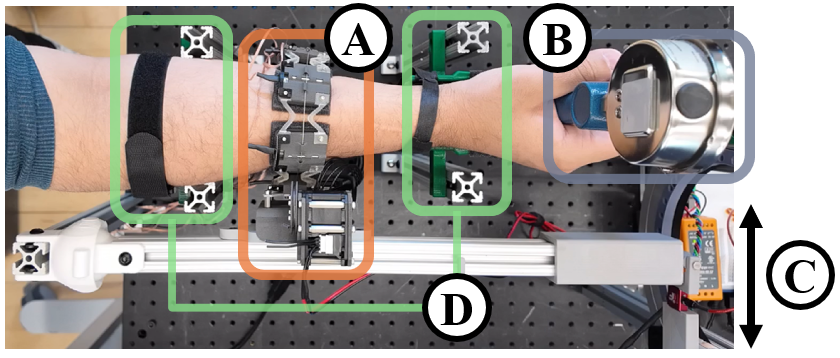
The experimental testbed for the effect of strap pretension and user muscle activation on interaction port stiffness, with (A) the actuated tensioning cuff with measurement of distributed interface forces, (B) hand dynamometer to measure user muscle activation, (C) arm anchors to ground the human, and (D) actuated linear carriage and single-axis load cell.
The interaction port stiffness between the human arm and the robot linkage is estimated through measurement of displacement and force at the linkage output.

The distributed interface force averaged across 6 FSR locations, visualized at four levels of strap pretension and across three conditions for muscle activation. The plot shows results averaged across all participants at the maximum during interaction loading.
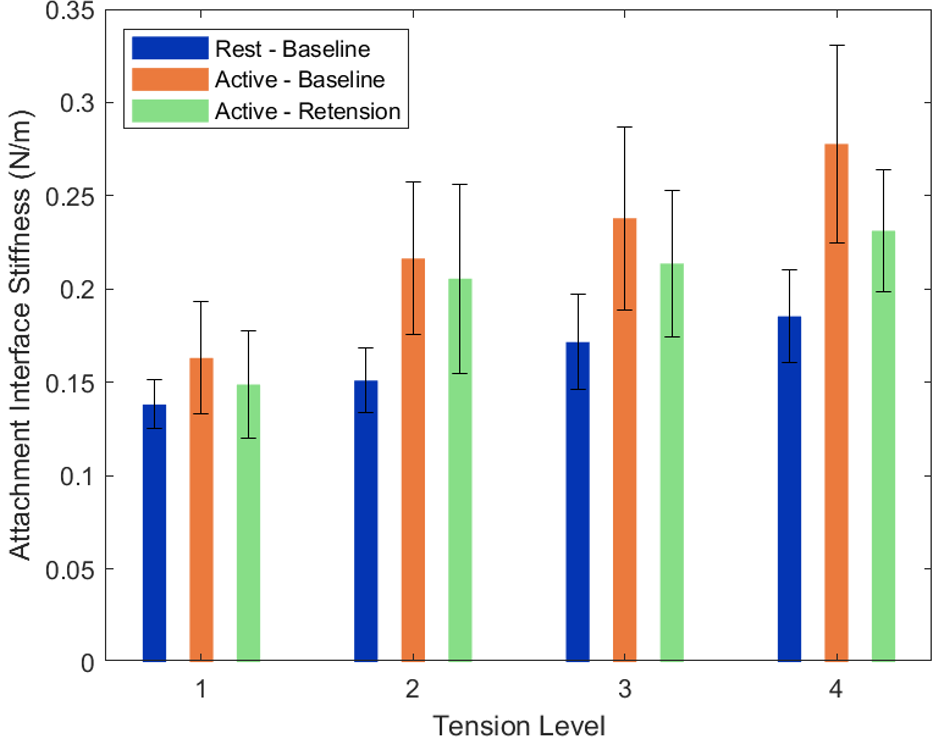
The effective stiffness across the interaction port at the human-robot interface, visualized at four levels of strap pretension and across three conditions for muscle activation. The plot shows results averaged across all participants.
Contributions:
Designed controlled human subject experiments (N=8) with systematic variation of 4 strap tension levels and 3 muscle activation conditions using randomized testing protocols
Implemented linear mixed-effects statistical modeling in R to isolate design variable effects while accounting for inter-subject variability and repeated measures
Developed novel actuated cuff with dual-motor tensioning system and 6-channel distributed FSR sensing for real-time interface pressure monitoring and control
Demonstrated quantitative relationship between strap pretension, muscle activation, and interaction port stiffness through systematic experimental validation
Collaborators: Victor Guzman, Stefano Dalla Gasperina, Ashish D. Deshpande