Multi-Sensor Instrumented Hand for Wearable Device Assessment
The instrumented hand is a low-cost, open-source measurement tool designed to validate soft wearable hand devices by providing accurate joint-level position and torque measurements. The system uses magnetoresistive sensors embedded in an anthropometrically-sized mannequin hand to overcome limitations of expensive motion capture systems for soft device validation.

The open-sourced Instrumented Hand for soft device validation measures joint level information from the thumb, index, and middle fingers. Palmar side (left) and dorsal side (right).
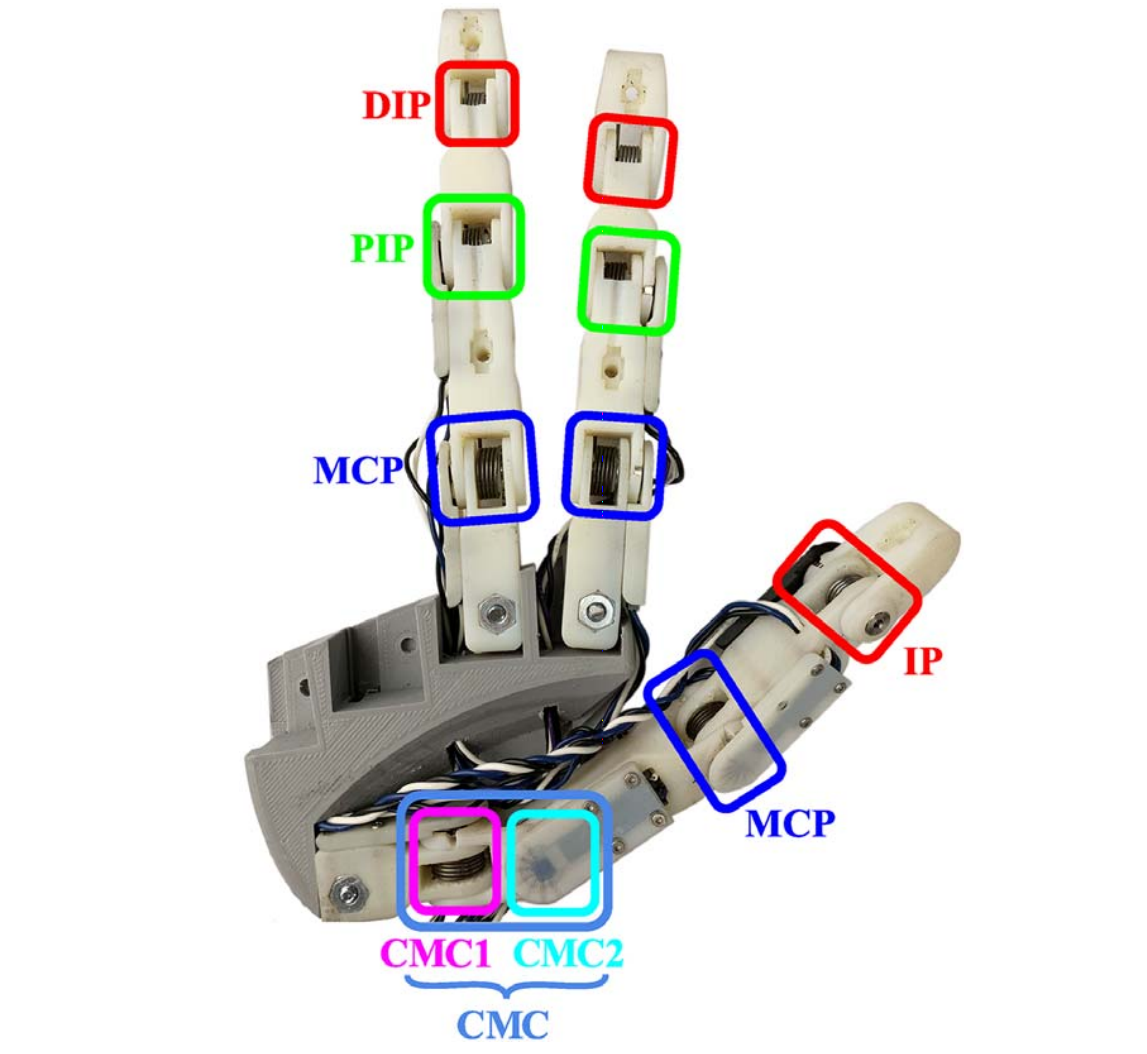
The Instrumented Hand with all rotary joints labeled. The CMC joint is approximated by two rotary joints, CMC1 and CMC2. The link between the thumb CMC and MCP joints is rotated to enable a more natural thumb orientation and flexion motion.

Side view of the PIP and DIP joints on the instrumented hand show the 1:1 coupling achieved by using a Kevlar braided line (1 mm, Spear-It) as highlighted in green and anchored on either end.
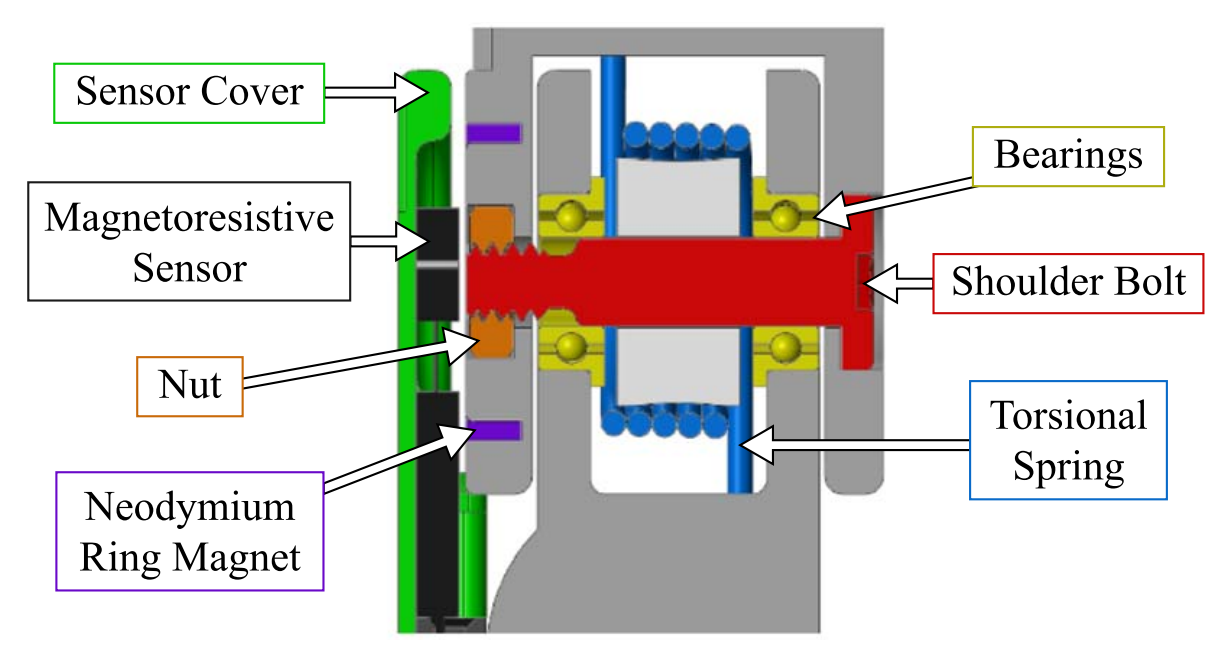
Cross-sectional view of a rotary joint showing the sensor cover, magnetoresistive sensor, neodymium ring magnet, nut, bearings, shoulder bolt, and torsional spring.
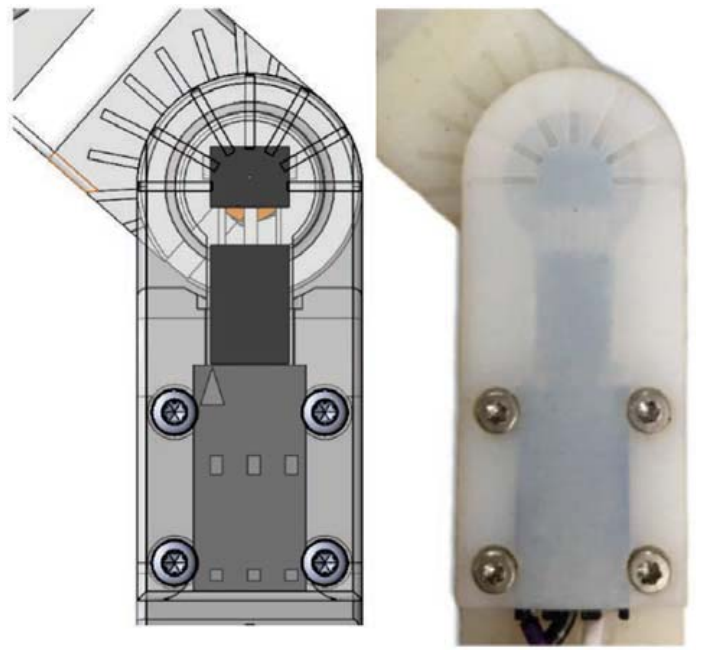
Side views of a rotary joint showing the indentations used to visually measure joint angles at 15 deg increments for calibration.
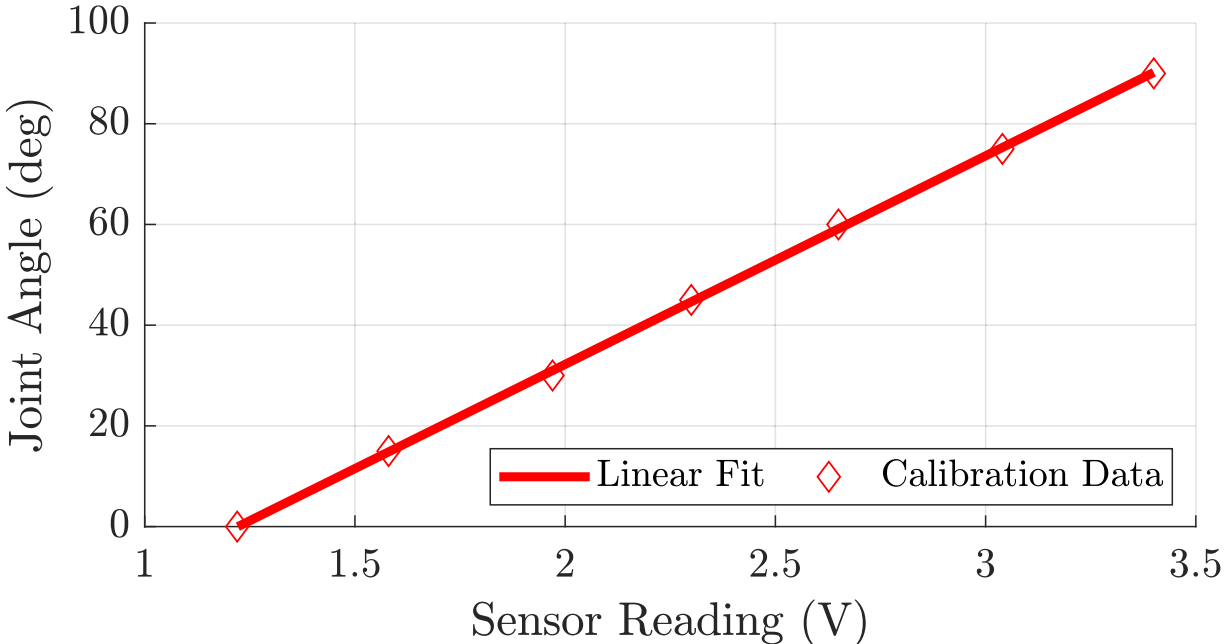
Calibration data from the PIP joint on the index finger with a linear regression (R^2 = 1) representative of all joints. As expected, the highly linear output for each of the joints of the Instrumented Hand supports its use in experimental validation of soft hand exoskeletons.
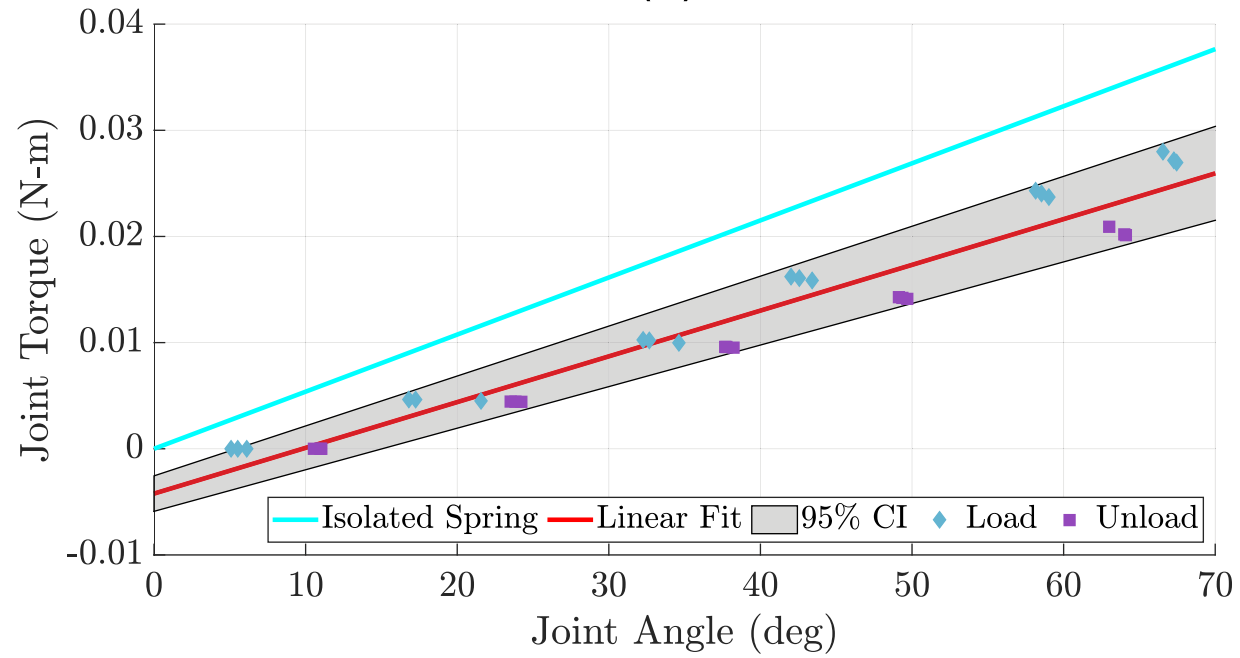
Torque characterization results showing the relationship between torque and joint angle with the 95% confidence interval possessing a width of 0.0104 N-m at the end of the ROM. The R^2 value for the linear fit shown in red is 0.9416. Also shown is the relationship for the spring in isolation based on the manufacturer’s specifications.

The SeptaPose Assistive and Rehabilitative (SPAR) Glove with individually actuated thumb, index, and secondary fingers is a soft exoskeleton which relies on the wearer’s musculoskeletal system for reaction forces. This reliance on a wearer makes the SPAR Glove a good candidate for validation with the Instrumented Hand.
Contributions:
Designed 8-joint instrumented hand system with magnetoresistive sensors (KMA210), achieving joint angle measurement accuracy within 7° across all joints
Integrated distributed sensing architecture using neodymium ring magnets and custom sensor covers, with C++ data processing through Mechatronics Engine and Library
Developed calibration protocols and validation testbeds achieving R² values up to 1.0 for linear joint angle relationships using Quanser Q8-USB DAQ
Implemented torsional spring-based torque measurement system enabling joint torque characterization with 20% friction loss compensation
Validated system performance through case study with SPAR Glove, demonstrating capability to measure multi-finger grasp kinematics and device range of motion
Collaborators: Victoria S. Joshi, John E. Britt, Chad G. Rose, Marcia K. O’Malley
Related Publications: