Maestro: Multi-Body Dynamics and Kinematic Modeling
Based on previous works by Agarwal and Esmatloo, this project involved developing comprehensive kinematic and dynamic models for hand exoskeleton systems using four-bar linkage mechanisms. The modeling work enabled accurate prediction of system behavior and informed mechanical design decisions for wearable robotic devices.

Maestro's human-robot kinematic system defined with real linkages labeled.
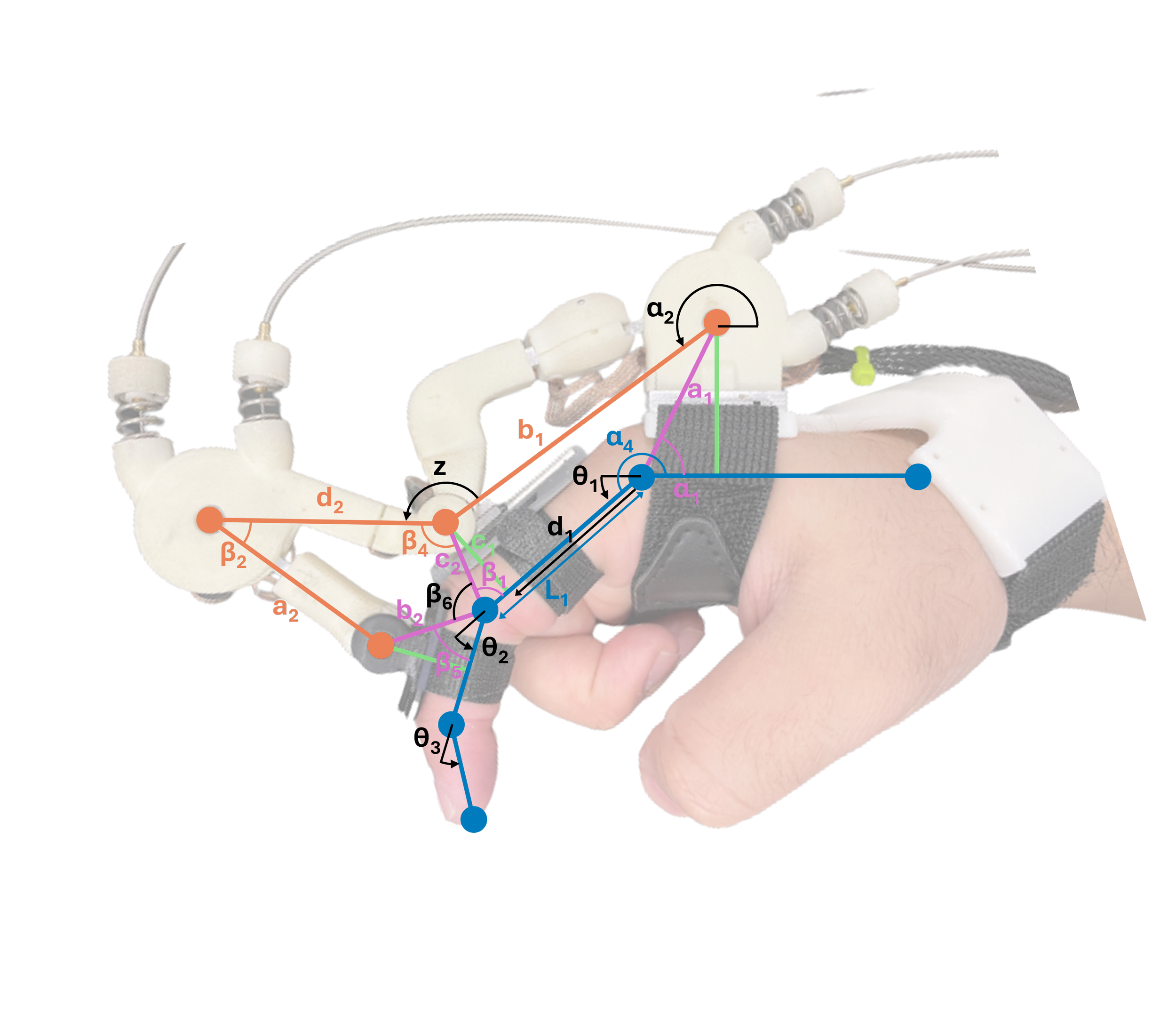
Maestro's human-robot kinematic system defined with virtual linkages labeled.
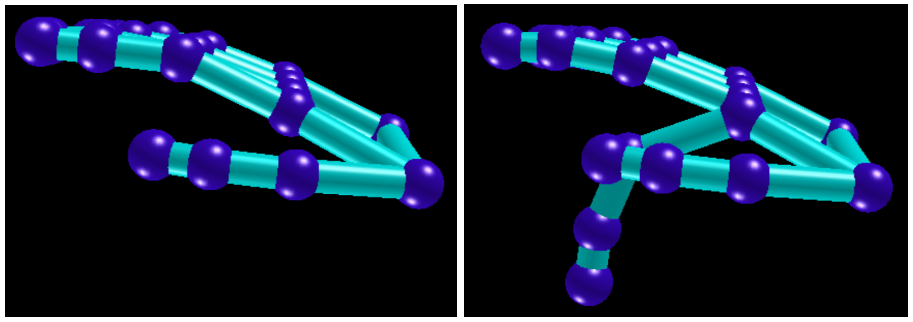
The cHand from CHAI3D is used to visualize the estimated hand pose, based on forward kinematics from the Maestro hand exoskeleton.
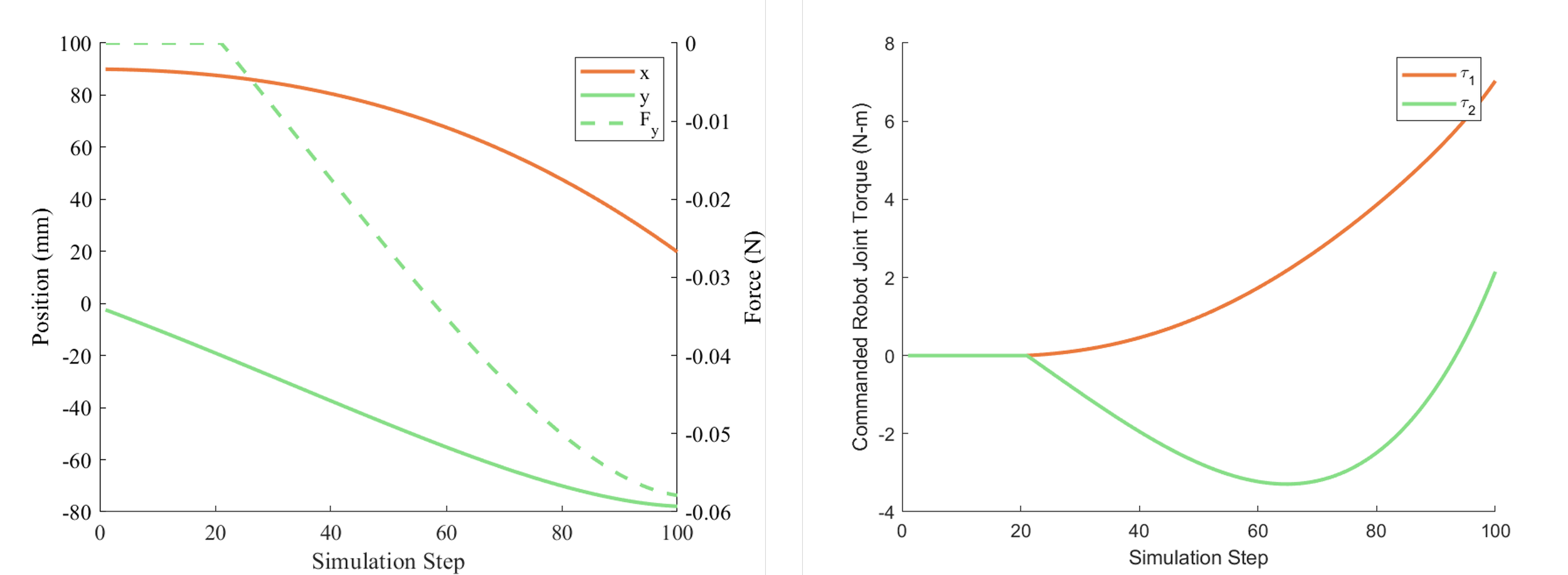
Results of a virtual wall interaction in simulation, showing the implementation of the Jacobian to estimate commanded robot joint torques. The virtual wall in this example is implemented at a y-position of 20mm, at which point the commanded torques become non-zero.
The Maestro hand exoskeleton operates at three coordinate domains: robot joint space, finger joint space, and fingertip Cartesian space. Based on previous work and four-bar linkage principles, I calculated the human-robot system’s forward kinematics and inverse kinetics. The forward kinematics use robot joint angle measurements to estimate fingertip position, which can then be used to implement virtual environments at the fingertip. The inverse kinetics are used to map desired fingertip interaction forces back to desired robot joint torques, which are then commanded to the Maestro hand exoskeleton. This project highlighted importance considerations and shortfalls of the modeling process, such as sensitivity to parameter errors and sensor calibration.
Contributions:
Developed comprehensive kinematic models using four-bar linkage mechanics and Denavit-Hartenberg parameters for multi-DOF finger exoskeleton systems
Implemented forward kinematics and analytical Jacobian calculations in MATLAB, enabling real-time joint space to Cartesian space transformations
Created Simscape Multibody simulation models incorporating viscoelastic tissue properties and compliant interface mechanics for pHRI prediction
Validated kinematic accuracy through experimental comparison with motion capture, achieving joint angle prediction within specified tolerance