Maestro: Multi-DOF Hand Exoskeleton System
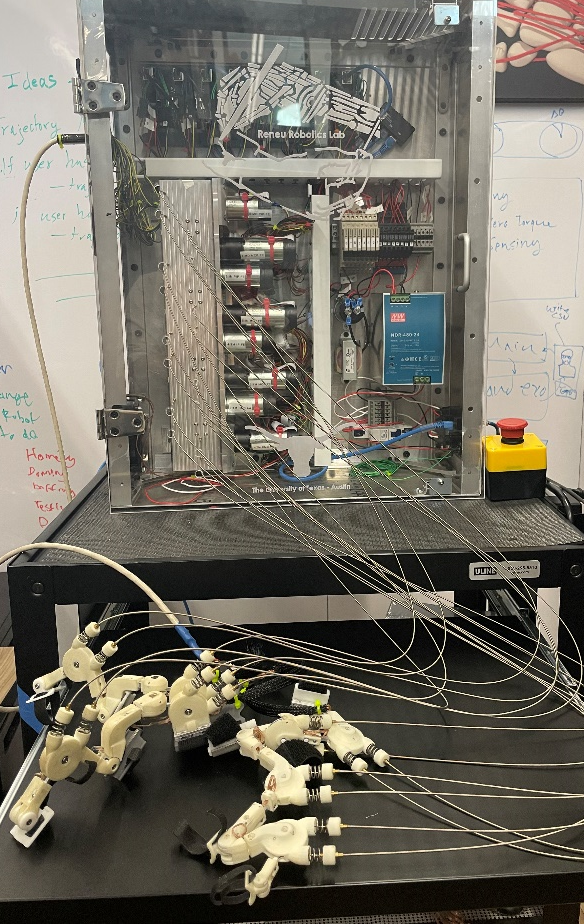
The Maestro hand exoskeleton is an 8-DOF wearable robotic device designed for rehabilitation and teleoperation applications. The system uses Bowden cable series elastic actuators (SEAs) to provide precise finger motion control and haptic feedback while maintaining a lightweight, backdrivable design. It is controlled through EtherCAT motor drivers and a custom Maestro C++ library.

The Maestro hand exoskeleton includes 3 finger modules (index, middle, and thumb), with 8 total DOFs actuated through Bowden cable SEAs.

Maestro's 8 DOFs are actuated through an EtherCAT communication architecture, enabling real-time control with position and force feedback.
Maestro's 8 DOFs are actuated through an EtherCAT communication architecture, enabling real-time control with position and force feedback.
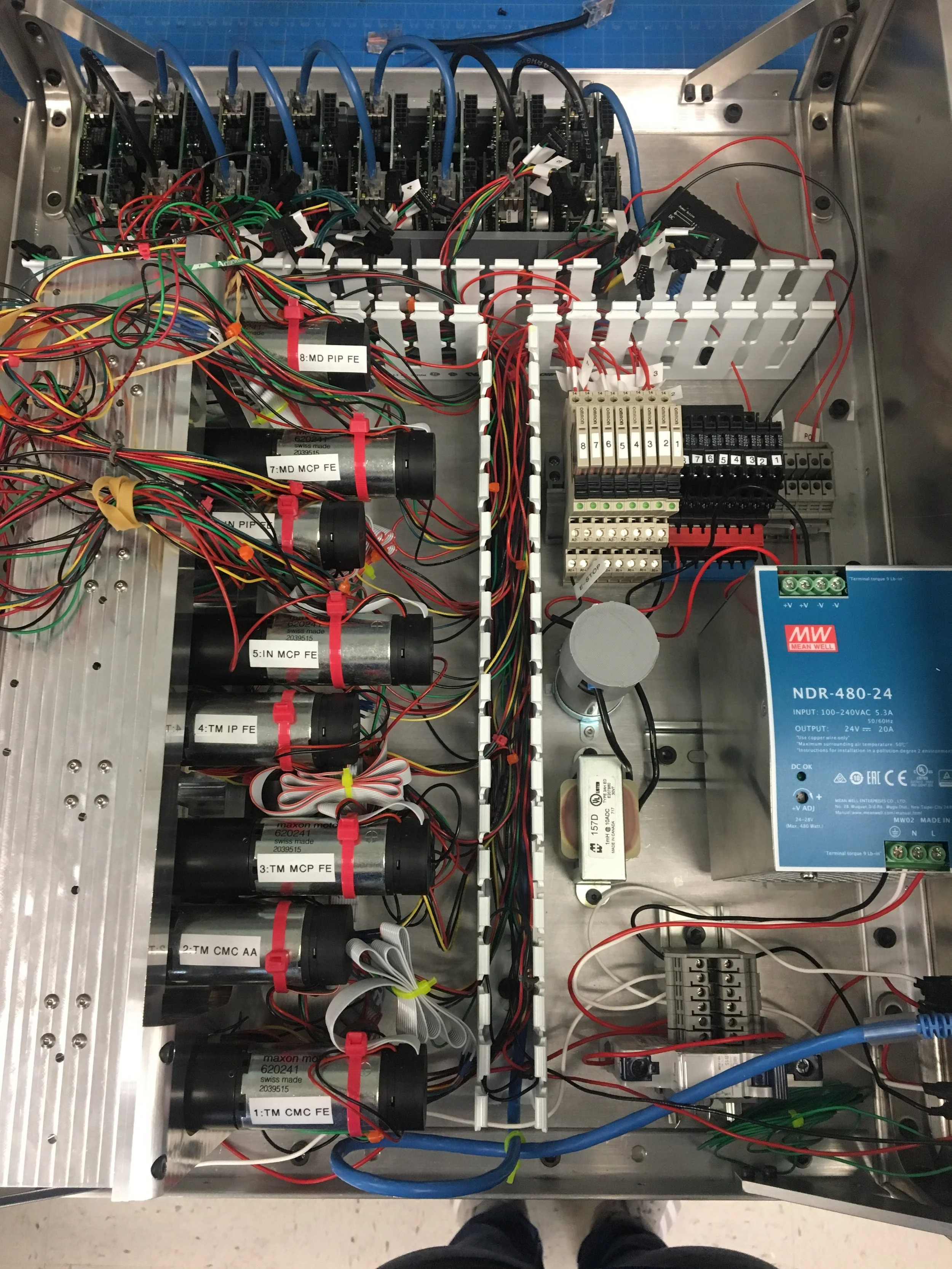
Bowden cable SEAs are actuated with brushed DC motors from Maxon.
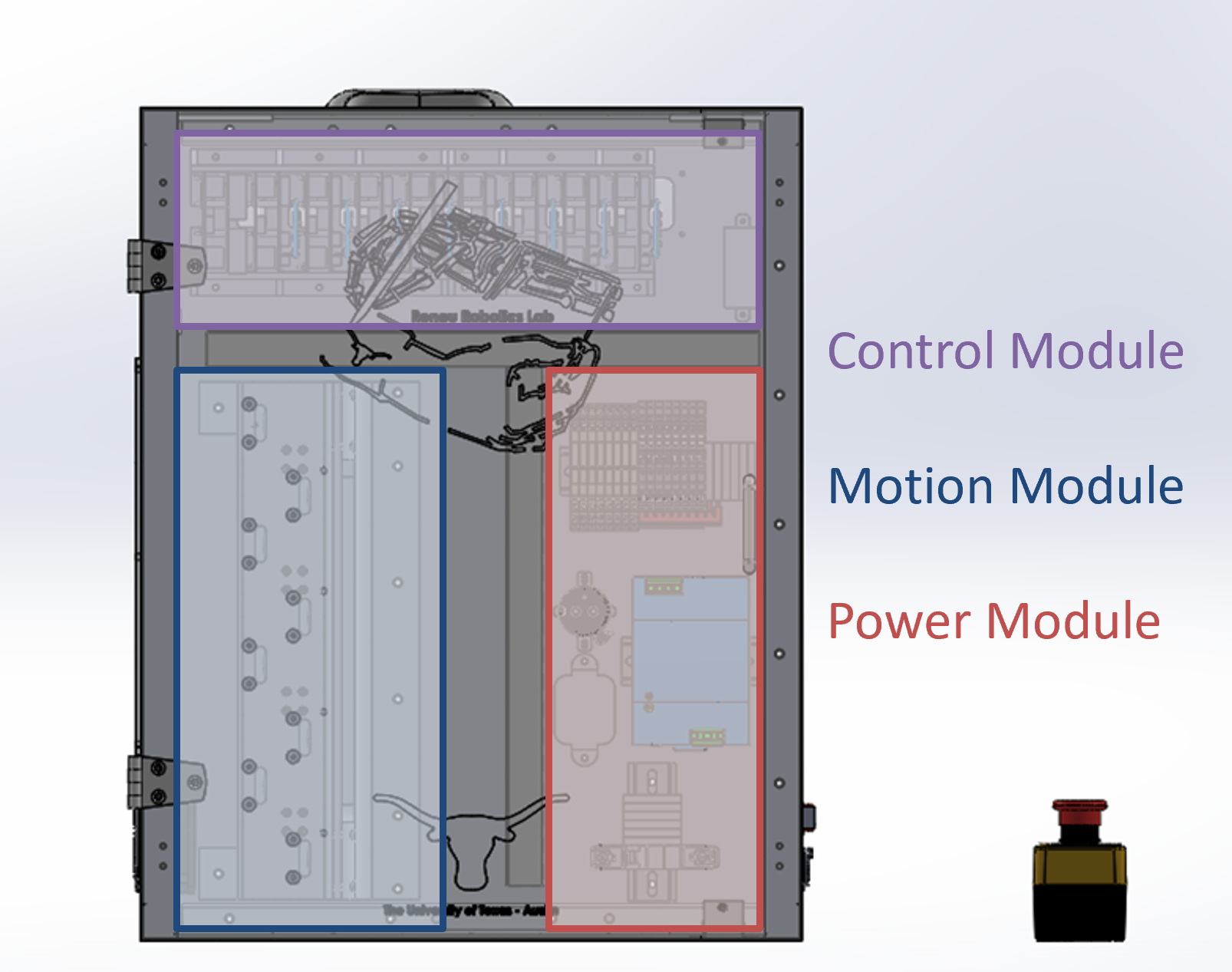
The electronics include EtherCAT motor drivers in the control module, brushed DC motors in the motion module, and power electronics in the power module.

The EtherCAT motor drivers are the latest version supplied from Harmonic Bionics, with real-time encoder feedback to enable high-fidelity low-level position control for all motors.
Contributions
Implemented real-time joint-level control in C++ for 8-DOF system, achieving precise torque control through EtherCAT motor drivers and PID control algorithms
Enhanced torque measurement accuracy by 12% through stiffness identification and backlash compensation of Bowden cable series elastic actuators (SEAs)
Developed forward kinematics and Jacobian modeling to enable force feedback VR/AR interactions with Unity engine visualization
Tuned low-level Maxon motor control parameters through ESCON Studio
Collaborators: Job Ramirez, Haiyun Zhang, Stefano Dalla Gasperina, Ashish D. Deshpande