Interface Optimization for Wearable Hand Robots
This research investigated how interface stiffness parameters affect the trade-off between user comfort and device interaction quality in hand exoskeletons. The study used simulation modeling and controlled human subject experiments to establish design principles for optimizing wearable robot attachments.
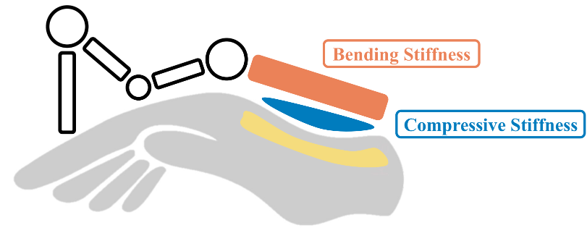
The proposed framework is applied to the Maestro hand exoskeleton as a case study, investigating the effects of bending stiffness and compressive stiffness at the interface on pHRI metrics.
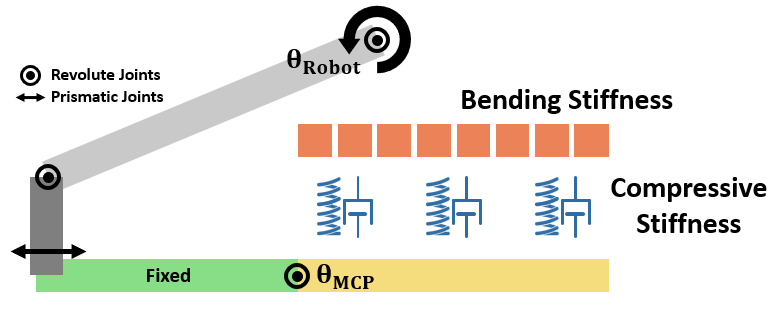
An overview of the simulation model from Simscape Multibody. The blue bar is modeled as a discretized flexible beam, corresponding to the bending stiffness properties of the dorsal plate. The highlighted spring-damper element represents the compressive stiffness at the human-robot interface, including viscoelastic properties from both human soft tissue and robot padding.
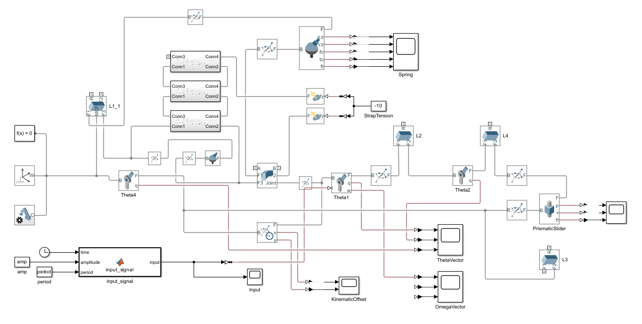
The simulation model in Simscape Multibody, developed through individual component blocks that come together to define the multi-body dynamics of the whole system.
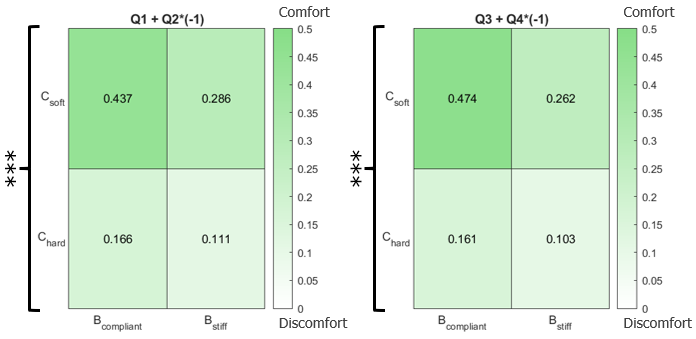
Results from the Bradley-Terry model, visualized as heatmaps showing the power for each interface stiffness condition across questions aggregated between the positive-negative pairs. A higher power value means that users preferred that condition more as an answer to the respective question.
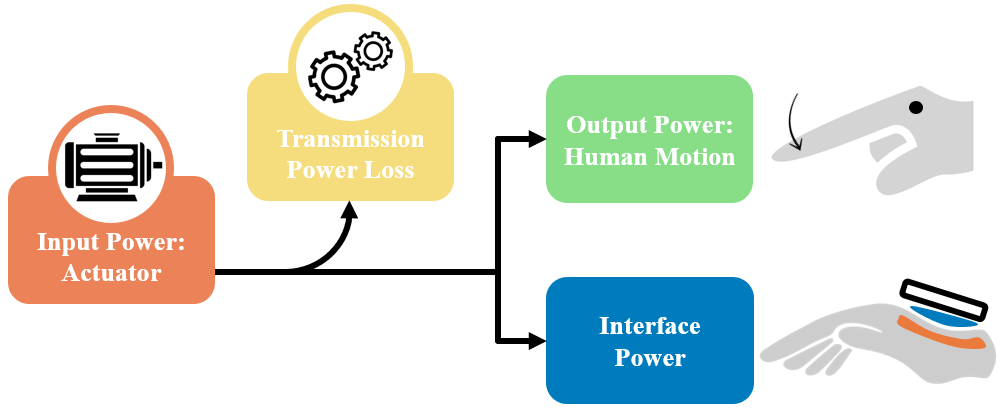
The power flow diagram of the system shows interface power as an unintended output. By eliminating or estimating other areas of power output in the system, we can isolate the desired interface power measurement.
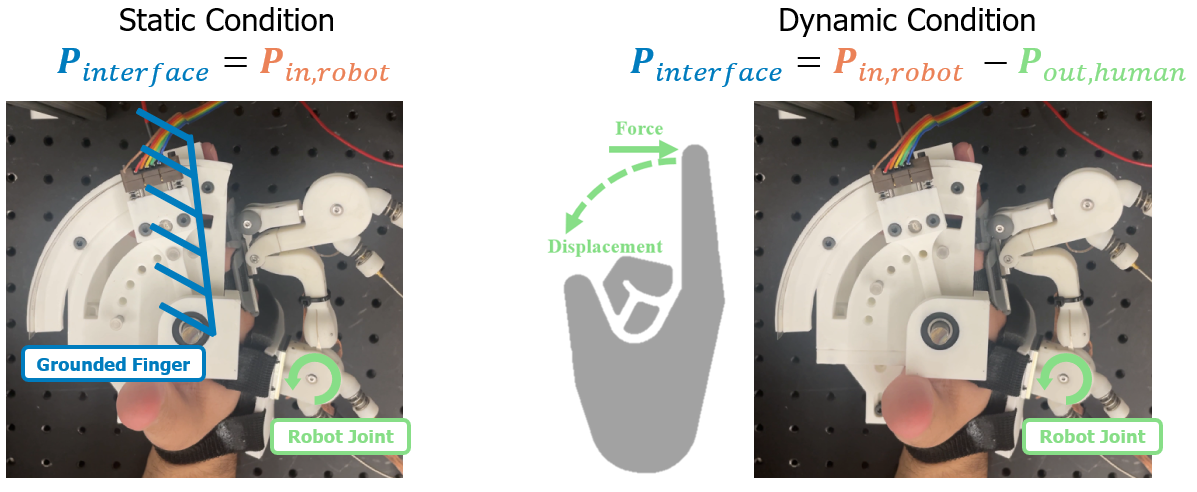
The instrumented testbed used to measure interaction quality metrics during physical human-robot interaction with the Maestro hand exoskeleton can be operated under both a static condition (left) and a dynamic condition (right). The testbed integrates a Futek single-axis load cell and a linear encoder to measure fingertip force and displacement.
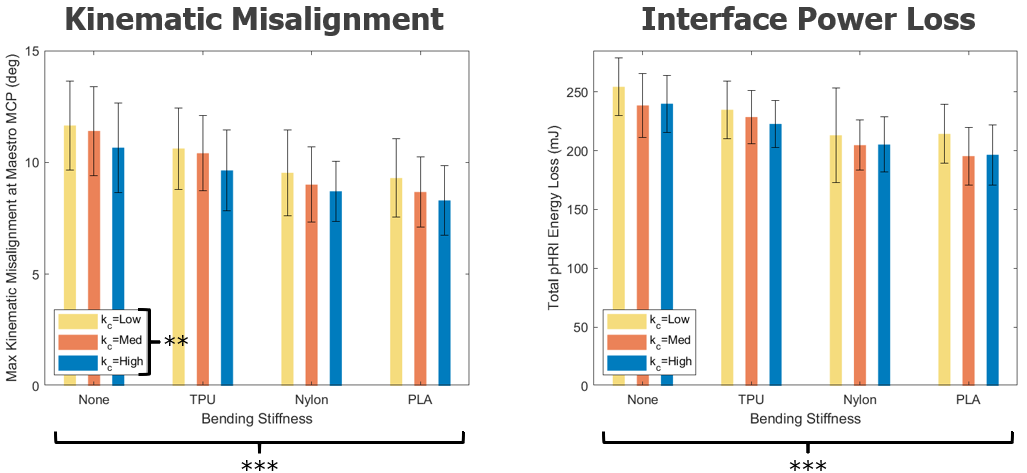
Kinematic misalignment (left) and interface energy loss (right) measured for 12 participants under a static task condition, across 12 combinations of interface stiffness. The 4 levels of bending stiffness are on the horizontal axis, and the 3 levels of compressive stiffness are shown across bars.
Contributions:
Conducted systematic human subject study (N=12) implementing A/B testing methodology with randomized interface stiffness conditions and controlled experimental protocols
Developed Simscape Multibody simulation model incorporating realistic human tissue properties to predict interface behavior and generate testable hypotheses
Implemented statistical analysis using Bradley-Terry modeling and likelihood-ratio tests to quantify qualitative user comfort assessments from paired comparison data
Established design principles through mixed-effects modeling showing bending stiffness affects interaction quality (p<0.001) while compressive stiffness influences user comfort
Collaborators: Gaurav Mukherjee, Raymond King, Stefano Dalla Gasperina, Ashish D. Deshpande
Related Publications: