Torque Sensing for Harmonic Drive Robotics Actuators
This industry-sponsored capstone project developed a high-precision underwater torque sensing system for Houston Mechatronics' Aquanaut subsea robot. The system needed to operate reliably at depths up to 300m while maintaining measurement accuracy for the robot's 7-DOF manipulator arms in harsh underwater environments.
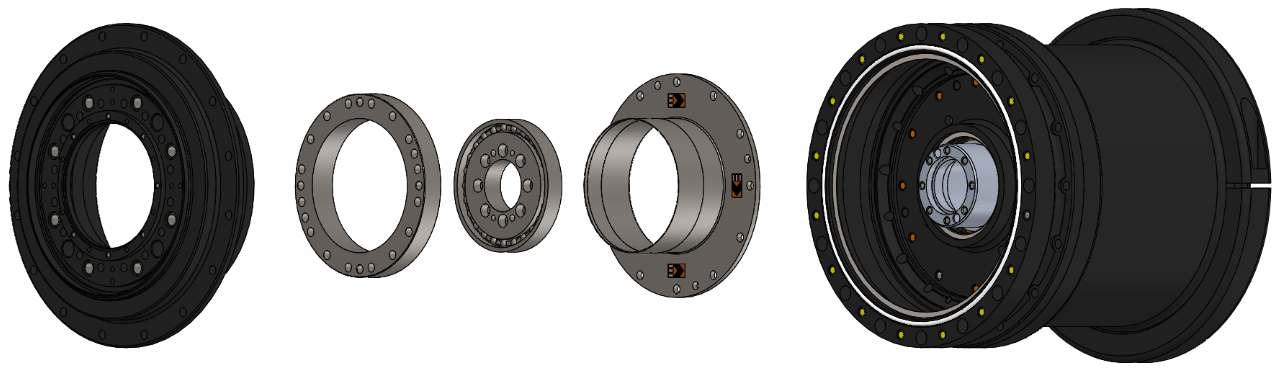
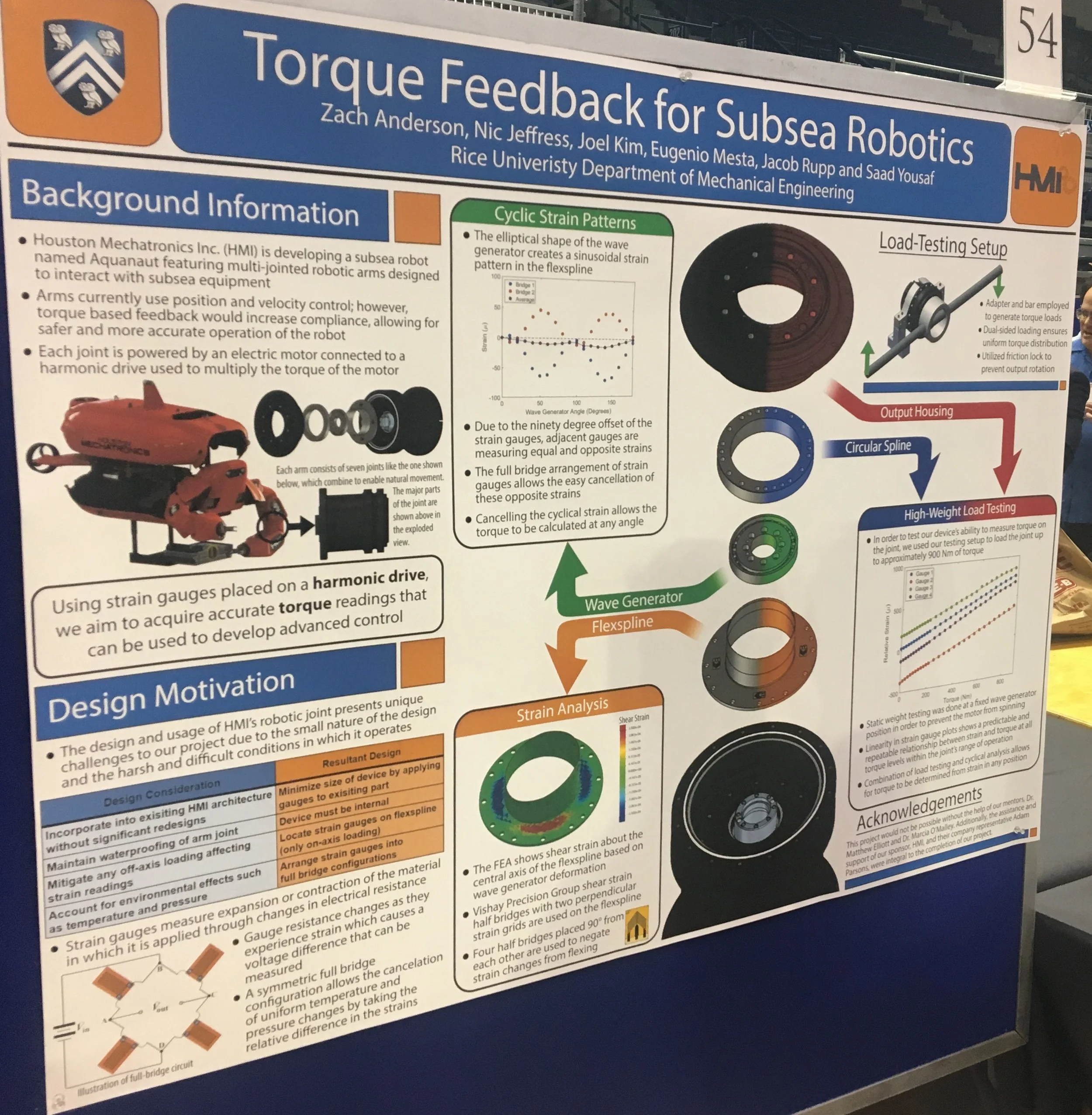
Exploded view of the underwater robot joint from Houston Mechatronics Inc, highlighting the harmonic drive components in the middle. For this project, we applied 4 strain gauges to the flexspline of the harmonic drive.
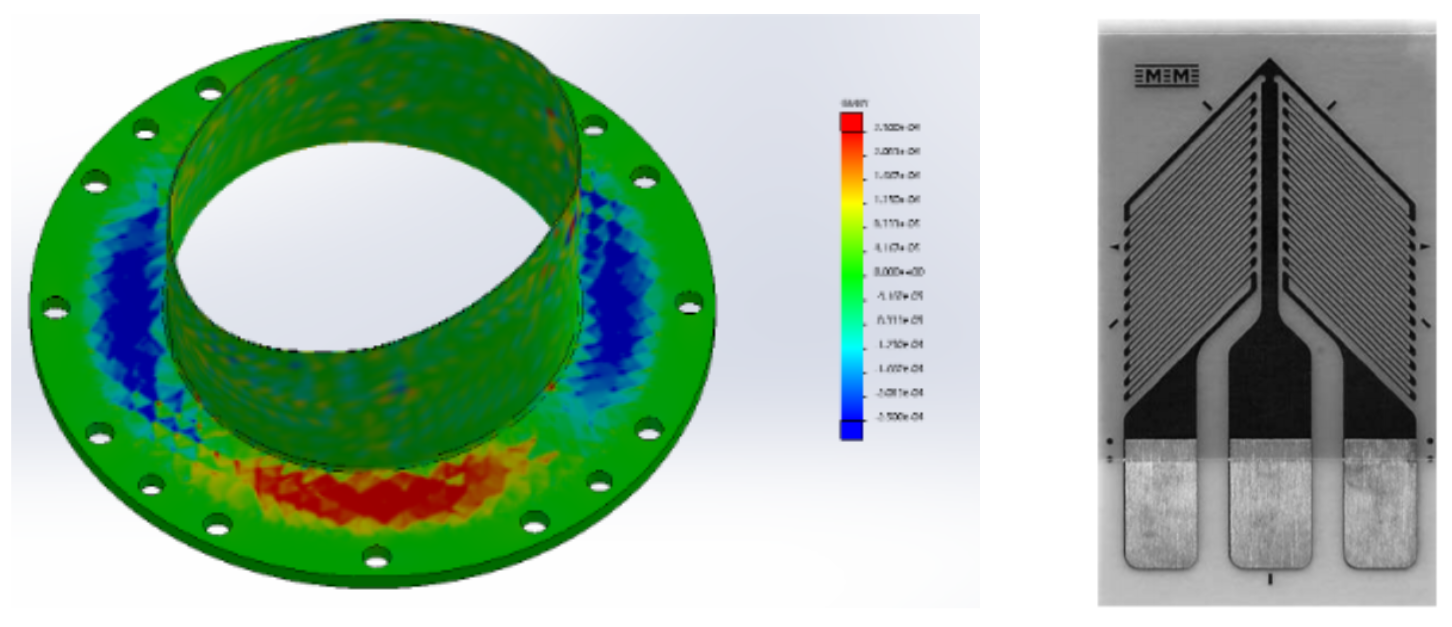
(Left) FEA of the flexspline, showing the equal and opposite strains imposed due to the inherent flexing in a harmonic drive. By removing the expected flexing strain from our strain gauge signals, we isolated the torque across the robot joint. (Right) The strain gauge model used in this project.
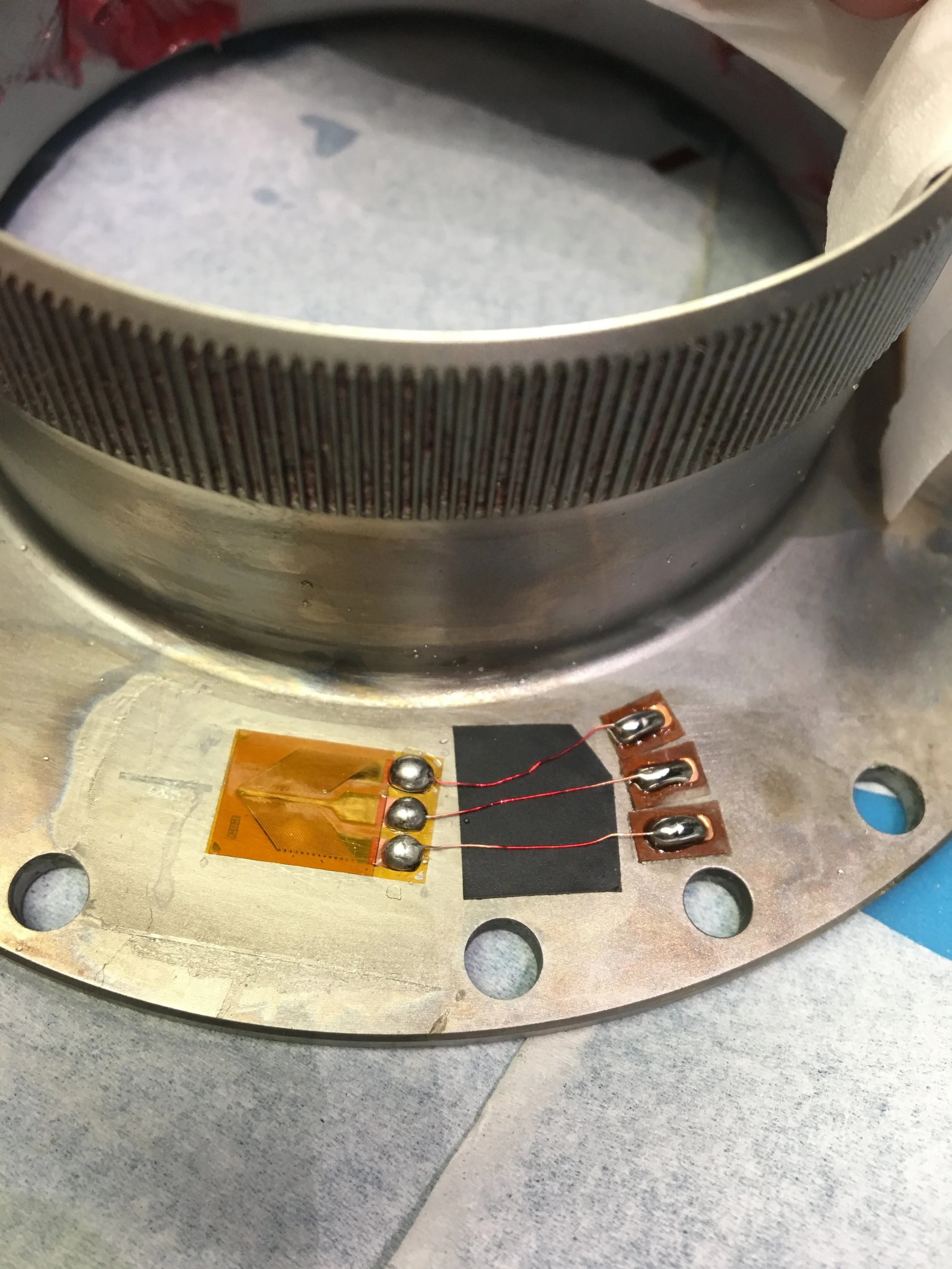
Custom application of a strain gauge on the outer surface of the flexspline, ensuring optimal contact and wiring.
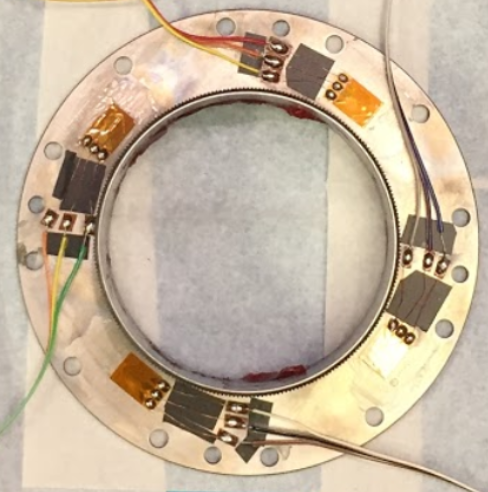
A full set of 4 strain gauges applied to the flexspline, with adjacent pairs undergoing equal and opposite strain during no-load harmonic drive motion.
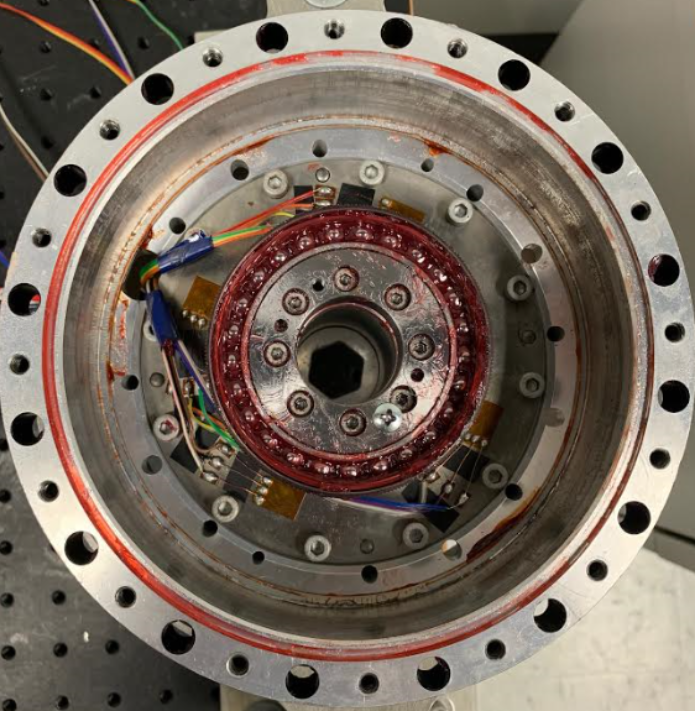
The flexspline with strain gauges installed inside the underwater robot joint.
Our project presented at the Rice Engineering Design Showcase, winning the "Best Robotics Project" award.
Contributions:
Led 6-person interdisciplinary team to develop underwater torque sensing system, achieving 8% accuracy at 950Nm torque capacity and 300m depth rating
Designed and implemented strain gauge integration including sensor application, wiring harnesses, and signal conditioning circuits for subsea applications
Developed comprehensive testbed for performance validation, integrating pressure testing capabilities and data acquisition systems
Coordinated project execution across multiple stakeholders including HMI engineers and strain gauge vendors
Awarded "Best Robotics Project" award at Rice Engineering Design Showcase 2019
Collaborators: Zachary Anderson, Nicholas Jeffress, Joel (Sung) Kim, Eugenio Mesta, Jacob Rupp