Series Elastic Actuator (SEA) Validation and Control
This project focused on characterizing and optimizing Bowden cable series elastic actuators for precise force control in hand exoskeleton applications. The work addressed fundamental challenges in cable-driven transmission systems, including backlash compensation and accurate torque estimation in compliant actuation systems.
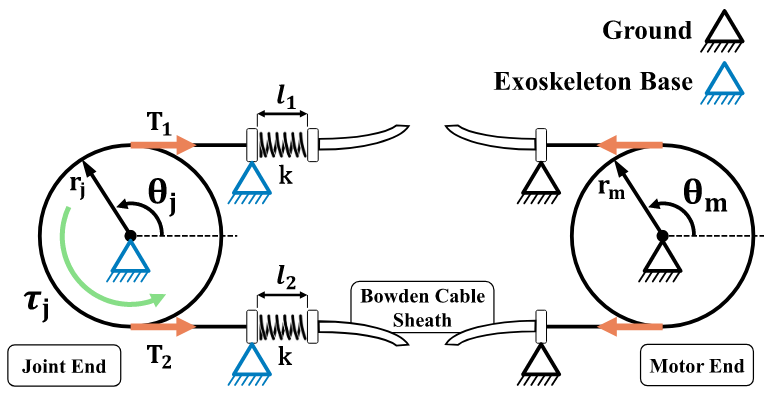
The Bowden cable SEA connects the actuated motor end to Maestro's robot joint.
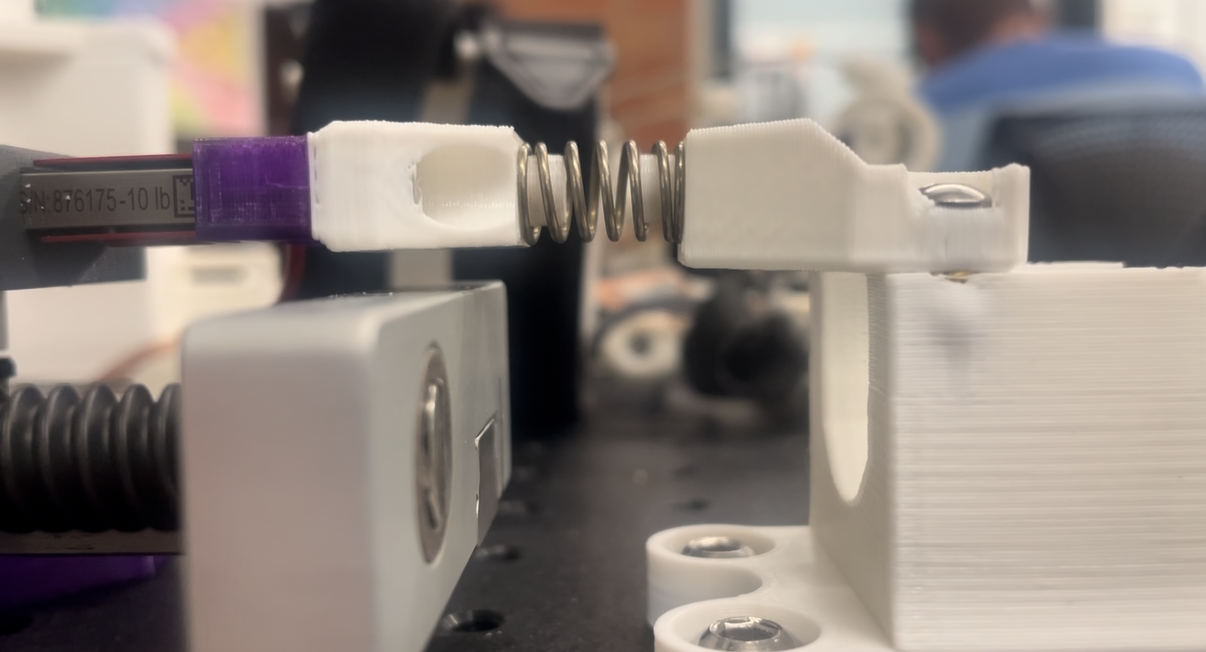
The spring characterization testbed with a Futek single-axis load cell and a PCB actuated linear carriage, controlled through an NI USB DAQ with GUIs developed in MATLAB.

Backlash calibration data from the index finger MCP joint in Maestro. As the motor is actuated through an increasing sinusoid, the robot joint follows with horizontal offsets due to Bowden cable backlash. The calibration is performed on the robot system alone without a human user.
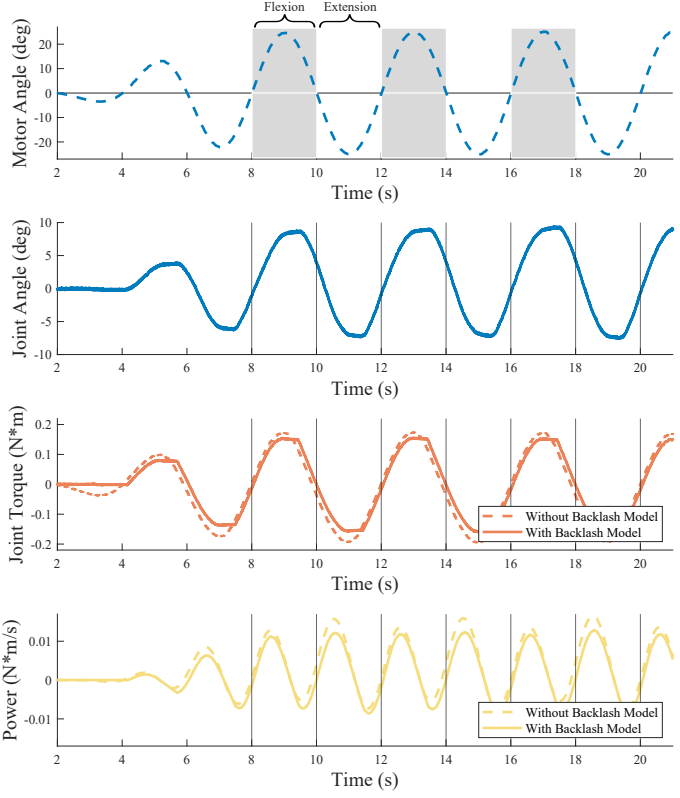
Time series data from one trial with no dorsal interface foam. The motor angle and robot joint angle are measured from Maestro's sensors. The joint torque is calculated using the SEA mechanism, with improved torque estimation through spring characterization and backlash compensation.
Contributions:
Developed forward backlash model with constrained optimization, eliminating manual parameter selection and improving torque measurement reliability
Characterized SEA performance through systematic stiffness identification, enabling accurate force transmission modeling for cable-driven actuators
Implemented backlash compensation algorithms that account for the primary source of power loss in Bowden cable transmission systems
Validated actuator performance through controlled testing protocols, establishing baseline metrics for series elastic actuator design
Collaborators: Job Ramirez, Haiyun Zhang, Stefano Dalla Gasperina, Gaurav Mukherjee, Raymond King, Ashish D. Deshpande
Related Publications:
Estimation of Interface Power During Physical Human-Robot Interaction in Hand Exoskeletons (In Progress)