Closed-Loop Force Control Tensioning with Actuated Forearm Cuff
This project developed an actuated tensioning system for wearable robot interfaces that dynamically modulates strap tension based on real-time force feedback. The system used distributed force sensing to maintain optimal interface pressure for user comfort and interaction quality.
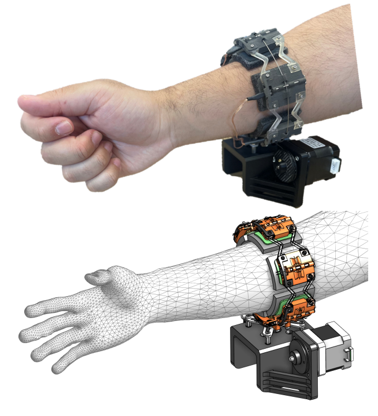
The proposed sensorized cuff implements force-sensing resistors (FSRs) with an actuated tensioning mechanism for measuring and modulating interface pressure.
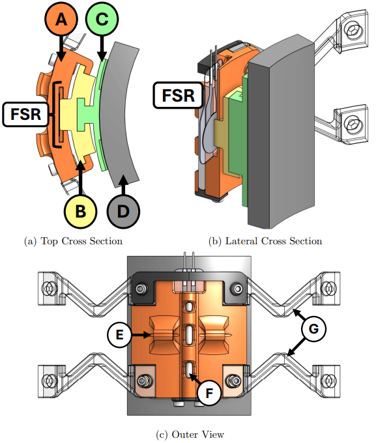
Design features highlighted for measuring interface pressure with actuated tensioning. Each FSR is housed between the (A) FSR module and the (B) force transmitter, which in turn interfaces through the (C) foam plate and (D) interface padding. The actuated tensioning mechanism is implemented through (E) cable routing over a (F) roller pin at each module. All six FSR modules are linked through (G) compliant elastomeric connectors which realize the hybrid rigid-soft cuff design.
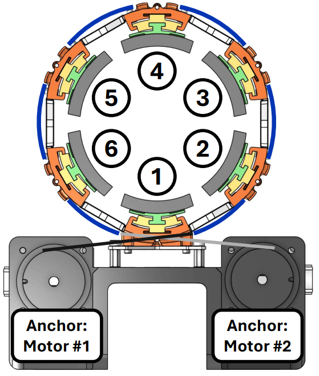
The cross section of the full cuff highlights the cable routing mechanism used to evenly distribute the actuated tensioning force around the arm.
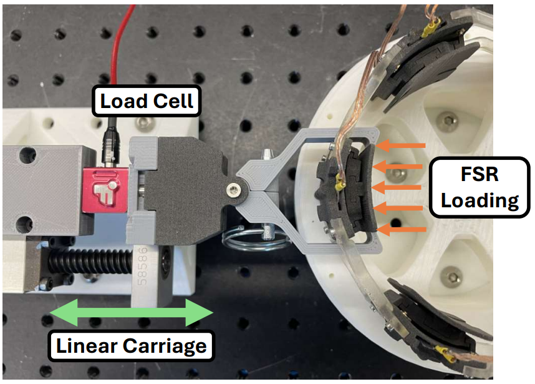
The FSR calibration testbed, showing how a Futek load cell interfaces with each FSR panel through the actuated linear testbed. The controlled loading and unloading of each FSR with a ground-truth measure for force is used to calibrate the FSR voltage output.
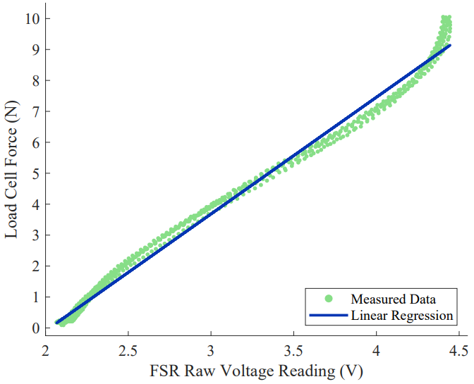
Measured data from the FSR calibration is plotted as ground truth load cell force versus raw voltage from the FSR. A linear regression is used for the calibration.
Contributions:
Designed dual-servomotor PID control system with real-time force feedback, achieving even tension distribution across 6 FSR measurement points
Implemented custom control algorithms in MATLAB interfacing with NI-DAQ hardware for real-time force regulation and motor position control
Developed controller tuning methodology optimizing system response time and stability for dynamic human-robot interaction scenarios
Validated closed-loop performance through systematic testing, demonstrating precise force regulation within ±0.2N across varying user conditions
Collaborators: Victor Guzman, Stefano Dalla Gasperina, Ashish D. Deshpande